











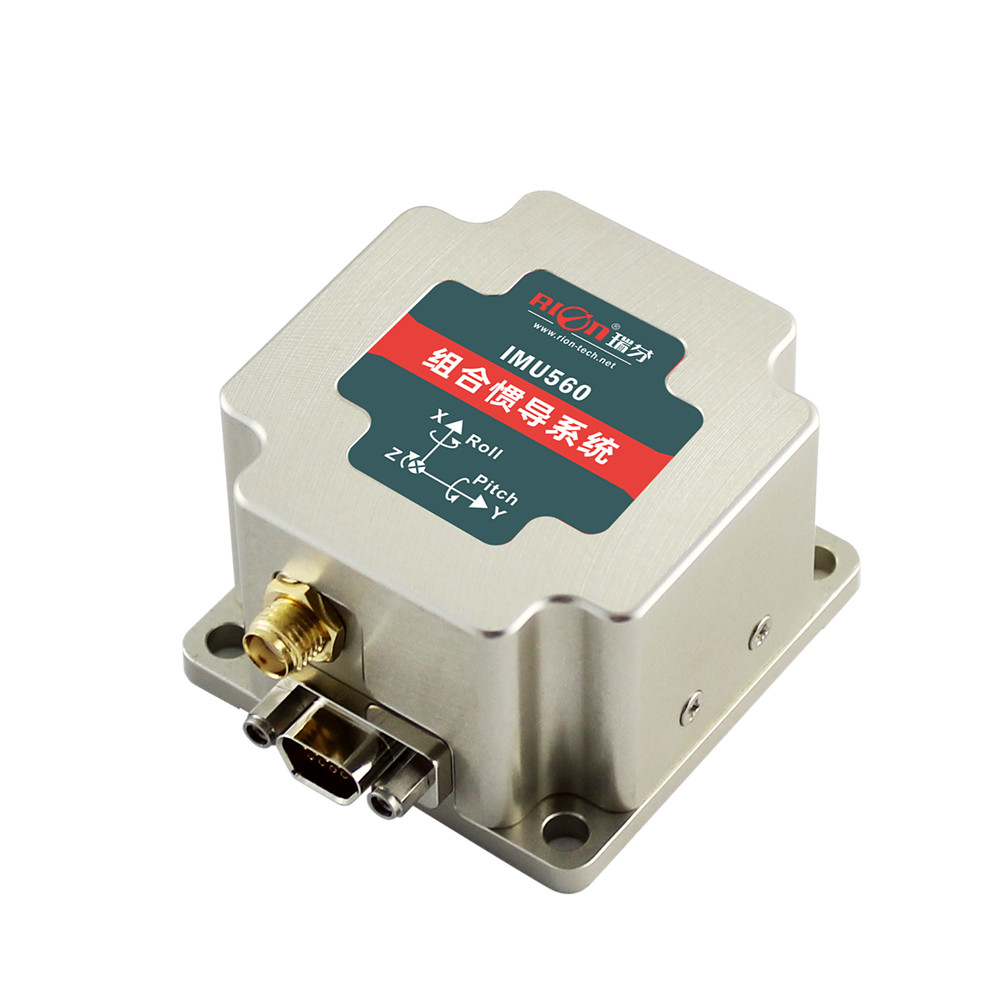
Z-Y-Xの回転順序に従って、X軸の肯定的な方向がキャリアの前部に指示されるとき、Z軸のまわりの回転の角度はキャスタ角である、Y軸のまわりの回転の角度はピッチ角であり、X軸のまわりの回転の角度はロール角度である。



特徴
●ジャイロコンパスのバイアス不安定10°/h (アランの変動)
●加速度計の偏差1.7mg (2g範囲)
適用
●移動態度の単位
●車の運行および測定および制御システム
●快速電車の測定および制御システム
●POSシステムを調査し、地図を描く
●船および海洋工学
●海洋および水中に地図を描くこと
●航空管制
IMU560シリーズは車/shipborne一般的な慣性および統合された運行プロダクトとして置かれる、
標的市場:
(1つの)動的コミュニケーション
(2)車の運行
(3つの)動的態度の測定
Z-Y-Xの回転順序に従って、X軸の肯定的な方向がキャリアの前部に指示されるとき、Z軸のまわりの回転の角度はキャスタ角である、Y軸のまわりの回転の角度はピッチ角であり、X軸のまわりの回転の角度はロール角度である。
1. 電源はさざ波ある9-36V DCべきである <50mv>
2。IMUの適用M4半円形のヘッドねじはキャリアで固定され、操作の間の緩みは測定の正確さに影響を与える。
3. もし可能なら、キャリアのまたは重心の近くの重心にそれを取付けなさい。
4. 厳しい振動、突然の温度変化(エンジンの隣に取付けられているのような)、および使用衝撃吸収材を必要ならば避けることを試みなさい。
5. キャリアの軸線とIMUの軸線をできるだけ一直線に並べなさい。
次元