



DCM302Bの高精度3Dのオリエンテーションのコンパス センサーとの+/-90deg傾きの補償の第2口径測定
![]()

概説
DCM302Bは第2平らな口径測定のアルゴリズムを使用して高精度3Dの電子コンパス、口径測定必要とする3D口径測定プロセスを完了することを姿勢の傾き、ちょうど平らなsitu回転が円ではない。 米国を使用して堅い磁気および柔らかい磁気口径測定のアルゴリズムの特許を取られた技術は、コンパスに中央処理装置を通して実時間解答者のヘッディング、および進むのに3-axis加速度計を使用することの磁気干渉の環境、RS232/RS485/TTLを含む±85°.Electronicのコンパス統合された高精度MCUの制御、さまざまな出力モード、標準インターフェースおよび他のインターフェイスまでDCM302Bの統合された三軸のフラックスゲートセンサーの口径測定のアルゴリズムによって磁気影響を、コンパスを保障するために補償の広い範囲の傾き角度のために先頭に立って除去させる、まだ高精度のヘッディングデータを時傾き角度提供し、他の通信用インタフェースのカスタム化を受け入れることができる。
小型、低い電力の消費とのDCM302Bはアンテナ安定性、車、システム統合に、使用することができ、他のより多くの分野、高い衝撃抵抗は非常に粗い環境で、高い信頼性コンパスの仕事をきちんと作り、小型化の軍の高精度の測定の総合制御システムのためにこの頃はより適している。
特徴:
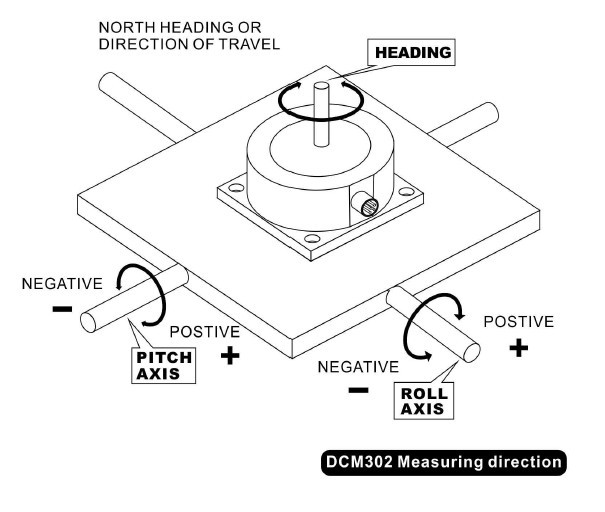
*Heading正確さ:0.5°~0.8°
*Tiltは測定範囲を曲げる:±90°
*Tiltの角度の決断:0.1°
*Tiltの角度の正確さ:0.1°
*Wideの温度:-40°C~+85°C
*Size:L60 ×W59×H29mm
*With堅い磁気、柔らかい磁気および角度の補償
*DC 5Vの電源
*Standard RS232/RS485/TTLの出力インターフェイス
* IP 67の保護クラス
適用:
*Satelliteのアンテナ調査衛星
調査し、地図を描く*Marineの運行
*GPSは運行を統合した
*Antennaのサーボ機構
*Gunの放出システム
*Infraredトナー
*Laserの距離計
作図装置のための*Map
*ROVの水中ロボット運行
*Oceanographyの測定の器械
*Special機会のロボット
*Unmanned航空機
![]()
| 変数 | ||
| 方位 | 最もよい先頭に立の正確さ(RMS) | 0.5°傾き<10> |
| 1.0°傾き<30> | ||
| 2.0°傾き<40> | ||
| 2.5°傾き<70> | ||
| 決断 | 0.1° | |
| コンパスの傾き変数 | ピッチの正確さ(RMS) | 0.1°<15> |
| 0.2°<30> | ||
| 0.3°<60> | ||
| 0.3°<85> | ||
| ピッチの傾きの範囲 | ±85° | |
| ロール正確さ(RMS) | 0.1°<15> | |
| 0.2°<30> | ||
| 0.3°<60> | ||
| 0.3°<85> | ||
| ロール傾きの範囲 | ±85° | |
| 決断 | 0.1° | |
| 最もよい傾きの補償の範囲 | <40> | |
| 口径測定 | 堅い鉄の口径測定 | はい |
| 軟鉄の口径測定 | はい | |
| 磁界の干渉の口径測定方法 | 1circle (第2口径測定)の平らな回転 | |
| 物理的な特徴 | 次元 | L60×W59×H29mm |
| 重量 | PCB:貝との20g、:100g | |
| RS-232/RS485/TTLのインターフェイス・コネクタ | 5PINconnector | |
| インターフェイス特徴 | 開始の遅れ | <50ms> |
| 最大出力率 | 20Hz/s | |
| コミュニケーション率 | 19200baudへの2400 | |
| 出力フォーマット | 二進高性能の議定書 | |
| 力 | 電源 | (デフォルト) DC+5V |
| (カスタマイズされた) DC9~36V | ||
| 現在(最高) | 40mA | |
| 理想的なモード | 30mA | |
| 休眠モード | TBD | |
| 環境 | 動作範囲 | -40℃~+85℃ |
| 保管温度 | -40℃~+85℃ | |
| 抵抗の衝撃の性能 | 2500g | |
| 電磁適合性 | EN61000およびGBT17626に従って | |
| MTBF | ≥40000時間/時 | |
| 絶縁材 | ≥100M | |
| 耐衝撃性 | 100g@11msの3軸方向(Sinusoid半分) | |
| Anti-vibration | 10grms、10~1000Hz | |
![]()
![]()
![]()
![]()
![]()











